1 Introduction Permanent magnet stepper motors typically require moment angle characteristics. The so-called moment angle characteristic, that is, the relationship between the static moment and the angular displacement in a range of step angles. The relationship between the general rectangular angle characteristics is shown in Fig. 1. 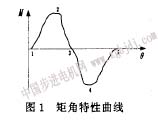 In Figure 1, θ is a step angle. θ/2 is the curve 3, the static moment, that is, the curve 2.4, the static moment is the largest. At the curves 1, 2 and 5, 4, it is the static torque rising section; at curves 2, 3 and 4, 3, it is the static torque falling section. It can be seen that measuring the moment angle characteristics is not simple, it cannot be measured by a simple hanging weight method. Since the hanging code can only test the rising section of the curve, that is, the 1-2 section and the 5-4 section of the curve of Fig. 1 (the 5-4 section is tested by the reverse hanging weight code), the angular displacement of the two points increases, and the static The torque increases. However, entering the falling section of the curve, that is, the 2-3 section and the 4-3 section in the curve of Fig. 1, the angular displacement of the two points increases, the static moment decreases, and the balance point cannot be found by the hanging code, and the test cannot be performed. In order to test the falling range of the static torque, it is necessary to clamp the stepping motor on the torque meter. However, such an angular displacement indication is inconvenient, unlike the simple test of clamping the motor on the dial. Can you find the best of both worlds and the advantages to find a way to test the moment angle characteristics, the method introduced in this paper is designed to solve this problem. 2 test principle test schematic shown in Figure 2, it is mounted on the optical indexing head on the motor, the motor shaft with a torque disk, with a cable hanging an overweight weight, pressed on the electronic scale table, electronic scale display The weight of the weight is out. The so-called overweight weight is designed to make the weight of the selected weight greater than 3 times the maximum pulling force of the motor static torque. For example, if the motor static torque is at the maximum point, the pulling force is 0. lkg, the weight of the weight should be selected to be nominally 0. 3kg. The purpose of this selection is that for the test, the fixed motor shaft does not move, the optical indexing head is shaken, and only the motor casing rotates, and the angular displacement between the two can be accurately read from the optical indexing head. At the same time, when the angular displacement occurs, the static moment is generated. Since the static torque direction is opposite to the weight of the weight, the static torque can be automatically displayed from the weight of the weight on the electronic scale. Automatic balance test. When the static torque rises, the weight automatically becomes lighter; when the static torque falls, the weight automatically becomes heavier until the static torque is equal to zero, and the weight is restored to the original weight. In this way, the problem that the static torque of the individual hanging code exceeds the maximum point cannot be balanced. 5公斤。 For example, the tension of the static torque is 0. 05kg, the weight of the weight is 0.2kg, the weight reading on the electronic scale is 0. 15kg. The static torque is reduced, because the Karma gravity and the pulling force of the cable are automatically balanced, and the static torque at each point is still the same as the rising segment, which is displayed on the weight of the weight reduced by the electronic scale. 2公斤。 The angular displacement is O point, the static moment is O, the electronic scale shows the weight of the weight of 0. 2kg.
In Figure 1, θ is a step angle. θ/2 is the curve 3, the static moment, that is, the curve 2.4, the static moment is the largest. At the curves 1, 2 and 5, 4, it is the static torque rising section; at curves 2, 3 and 4, 3, it is the static torque falling section. It can be seen that measuring the moment angle characteristics is not simple, it cannot be measured by a simple hanging weight method. Since the hanging code can only test the rising section of the curve, that is, the 1-2 section and the 5-4 section of the curve of Fig. 1 (the 5-4 section is tested by the reverse hanging weight code), the angular displacement of the two points increases, and the static The torque increases. However, entering the falling section of the curve, that is, the 2-3 section and the 4-3 section in the curve of Fig. 1, the angular displacement of the two points increases, the static moment decreases, and the balance point cannot be found by the hanging code, and the test cannot be performed. In order to test the falling range of the static torque, it is necessary to clamp the stepping motor on the torque meter. However, such an angular displacement indication is inconvenient, unlike the simple test of clamping the motor on the dial. Can you find the best of both worlds and the advantages to find a way to test the moment angle characteristics, the method introduced in this paper is designed to solve this problem. 2 test principle test schematic shown in Figure 2, it is mounted on the optical indexing head on the motor, the motor shaft with a torque disk, with a cable hanging an overweight weight, pressed on the electronic scale table, electronic scale display The weight of the weight is out. The so-called overweight weight is designed to make the weight of the selected weight greater than 3 times the maximum pulling force of the motor static torque. For example, if the motor static torque is at the maximum point, the pulling force is 0. lkg, the weight of the weight should be selected to be nominally 0. 3kg. The purpose of this selection is that for the test, the fixed motor shaft does not move, the optical indexing head is shaken, and only the motor casing rotates, and the angular displacement between the two can be accurately read from the optical indexing head. At the same time, when the angular displacement occurs, the static moment is generated. Since the static torque direction is opposite to the weight of the weight, the static torque can be automatically displayed from the weight of the weight on the electronic scale. Automatic balance test. When the static torque rises, the weight automatically becomes lighter; when the static torque falls, the weight automatically becomes heavier until the static torque is equal to zero, and the weight is restored to the original weight. In this way, the problem that the static torque of the individual hanging code exceeds the maximum point cannot be balanced. 5公斤。 For example, the tension of the static torque is 0. 05kg, the weight of the weight is 0.2kg, the weight reading on the electronic scale is 0. 15kg. The static torque is reduced, because the Karma gravity and the pulling force of the cable are automatically balanced, and the static torque at each point is still the same as the rising segment, which is displayed on the weight of the weight reduced by the electronic scale. 2公斤。 The angular displacement is O point, the static moment is O, the electronic scale shows the weight of the weight of 0. 2kg. 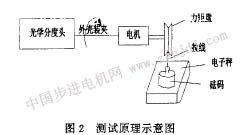 3 Test example Take the torque angle characteristic test of permanent magnet stepping motor with step angle of 909 as an example. The test voltage is 5v, the maximum static torque is 0.013 6Nm, the torque disk radius is 2cm, and the weight of the weight is 0.2kg. Table 1 is the moment angle characteristics of 00 to 450 in a step and the test data of each point. 450 to 900 because of the need to reverse the hanging code test, and the test method is the same as the forward direction, it is not listed.
3 Test example Take the torque angle characteristic test of permanent magnet stepping motor with step angle of 909 as an example. The test voltage is 5v, the maximum static torque is 0.013 6Nm, the torque disk radius is 2cm, and the weight of the weight is 0.2kg. Table 1 is the moment angle characteristics of 00 to 450 in a step and the test data of each point. 450 to 900 because of the need to reverse the hanging code test, and the test method is the same as the forward direction, it is not listed. 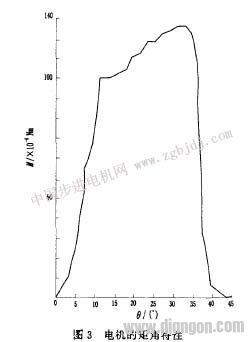 The static moment at each point in Table 1 is the pulling force of the cable and the radius of the torque disk by 2 cm. The pulling force of the cable is equal to the weight of the weight of 0.2kg minus the reading of the electronic scale. The torque angle characteristics of the motor can be drawn from the data in Table 1, as shown in Figure 3.
The static moment at each point in Table 1 is the pulling force of the cable and the radius of the torque disk by 2 cm. The pulling force of the cable is equal to the weight of the weight of 0.2kg minus the reading of the electronic scale. The torque angle characteristics of the motor can be drawn from the data in Table 1, as shown in Figure 3. 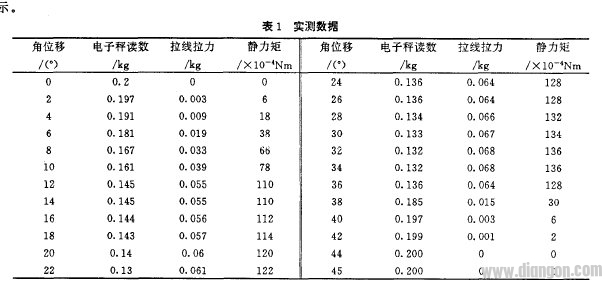 It can be seen that this method is used to measure the falling range of static torque, which is accurate and reliable. 4 should pay attention to the problem (1) 00 position determination. The method shakes the optical indexing head under the condition that the pulling wire has no pulling force, and the rotating shaft rotates together with the casing. Therefore, determine O. When the position is concerned, the change of the weight of the weight on the electronic scale should be observed. 00 position, the optical indexing head is slightly shaken, the weight on the electronic scale will be self-heavy and light I will be returned, the weight will be restored to its own weight, and the degree on the optical indexing head of this point will be read, which is recorded as 00 of the angular displacement. After that, you can get from O. Start to increase the angular displacement and perform each point test. (2) Choice of weight weight. The choice of the weight of the weight, it is recommended to choose more than 3 times the pulling force of the cable. This is because the heavier the weight, the smaller the displacement under tension. If the weight of the weight is slightly larger than the pulling force of the cable, at the maximum point of the static torque, confusion will occur and the electronic scale reading will be inaccurate. For example, when the author performs the above motor test, the maximum pulling force of the static torque is 0. 068kg, and the above-mentioned chaos phenomenon occurs after the self-weight 0.lkg weight test is started, and then the self-weight 0. 2kg weight is selected to obtain satisfactory results. 5 Conclusion Advantages As is known from the above description, the disadvantage is that the optical indexing head of the method is subjected to a moment on the output shaft, which is disadvantageous for a precision indexing device. However, if the static torque is less than 0. 02Nm, it will not affect the indexing head. If the static torque is greater than 0. 02Nm, it is not suitable to use the upper method. In order to solve this problem, the same electronic scale method can also be used to clamp the motor on the dial, with a pointer on the casing, and rotating the casing to indicate the angular displacement on the dial. Only the angular displacement indicates that the accuracy is worse than the optical indexing head. However, the angular displacement accuracy does not necessarily require a good quotient. It only needs to observe the change of the static moment over the entire angular displacement range. It can be seen that when the static torque is large, the voltage can be reduced, the static torque can be reduced, and the test can be performed by being sandwiched on the optical indexing head.
It can be seen that this method is used to measure the falling range of static torque, which is accurate and reliable. 4 should pay attention to the problem (1) 00 position determination. The method shakes the optical indexing head under the condition that the pulling wire has no pulling force, and the rotating shaft rotates together with the casing. Therefore, determine O. When the position is concerned, the change of the weight of the weight on the electronic scale should be observed. 00 position, the optical indexing head is slightly shaken, the weight on the electronic scale will be self-heavy and light I will be returned, the weight will be restored to its own weight, and the degree on the optical indexing head of this point will be read, which is recorded as 00 of the angular displacement. After that, you can get from O. Start to increase the angular displacement and perform each point test. (2) Choice of weight weight. The choice of the weight of the weight, it is recommended to choose more than 3 times the pulling force of the cable. This is because the heavier the weight, the smaller the displacement under tension. If the weight of the weight is slightly larger than the pulling force of the cable, at the maximum point of the static torque, confusion will occur and the electronic scale reading will be inaccurate. For example, when the author performs the above motor test, the maximum pulling force of the static torque is 0. 068kg, and the above-mentioned chaos phenomenon occurs after the self-weight 0.lkg weight test is started, and then the self-weight 0. 2kg weight is selected to obtain satisfactory results. 5 Conclusion Advantages As is known from the above description, the disadvantage is that the optical indexing head of the method is subjected to a moment on the output shaft, which is disadvantageous for a precision indexing device. However, if the static torque is less than 0. 02Nm, it will not affect the indexing head. If the static torque is greater than 0. 02Nm, it is not suitable to use the upper method. In order to solve this problem, the same electronic scale method can also be used to clamp the motor on the dial, with a pointer on the casing, and rotating the casing to indicate the angular displacement on the dial. Only the angular displacement indicates that the accuracy is worse than the optical indexing head. However, the angular displacement accuracy does not necessarily require a good quotient. It only needs to observe the change of the static moment over the entire angular displacement range. It can be seen that when the static torque is large, the voltage can be reduced, the static torque can be reduced, and the test can be performed by being sandwiched on the optical indexing head.
We cover many types of Connectors for industrial, electrical and automotive, such as IP68 and waterproof connectors, OBD diagnostic connectors, also the standard or custom-designed power connectors for MINI FIT, MICRO FIT, MATE-N-LOCK.
Connectors System,Board System Connector,Efi System Injector Connector,Efi System Car Connector
ETOP WIREHARNESS LIMITED , https://www.wireharness-assembling.com