With the increasingly serious anti-terrorism situation at home and abroad and the frequent occurrence of various emergencies, higher requirements can be put forward for the armed police forces to complete tasks quickly and effectively in various complicated and dangerous environments. Traditional means of reconnaissance can no longer meet the needs of the situation, such as major natural disasters, which can cause rescue work to be unfolded; counter-terrorism or assistance in arrests cannot effectively track suspects. The appearance of the unmanned reconnaissance aircraft brings convenience to the duty personnel, but the vibration generated by the drone itself during the reconnaissance process will cause the image shooting to shake, thus greatly affecting the correct decision of the commander. The traditional autopilot uses an inertial measurement unit to obtain attitude information of the aircraft, including an angular velocity meter (gyro) and an accelerometer. The gyro is used to measure the attitude angle and angular velocity of the aircraft; the accelerometer is used to measure the projection of two horizontal directions under normal gravity acceleration, and the current attitude of the aircraft, that is, the pitch angle and the roll angle, can be converted by the triangular relationship. However, the attitude information measured by the accelerometer is very susceptible to interference from the vibration of the aircraft and the self-acceleration during maneuvering. The measurement accuracy error is generally large and the stability is poor, which makes the reconnaissance effect affected. In order to solve the flight stability of the UAV, a full attitude stabilization control system consisting of a three-axis gyro and a tilt sensor is studied to improve the stability of the UAV when performing tasks.
l System featuresThe full attitude stabilization control loop is formed by the gyro and the tilt sensor. The angular velocity information obtained by the gyro is used as a stabilization feedback control to make the aircraft more "slow" in maneuvering, thereby measuring the aircraft roll angle and pitch angle using the tilt sensor. Then, the angular rate information measured by the gyro and the attitude angle measured by the tilt sensor are subjected to a strap-down operation to obtain the merged posture information. This more complicated strapdown algorithm can greatly improve the attitude accuracy.
2 attitude stabilization control law hardware designThe drone attitude stabilization control belongs to the inner loop control, which includes modes such as attitude maintenance and control, and speed control. The inner loop control is based on the three-axis gyro and the tilt sensor to obtain the flight attitude of the drone. Through the control of the elevator and the rudder, the flight attitude is stabilized and controlled. The inner loop control is the core loop of flight control and the basis of the outer loop control such as flight altitude and track. The outer loop control is based on the position of the GPS, the heading signal, and the barometric altitude signal of the height sensor. It calculates the predetermined and actual course of the aircraft through the navigation control method.
The inner loop control of the drone is the basis of the outer loop control and plays a vital role in its ability to stabilize the flight. In this system, the inner loop is an attitude stabilization control loop composed of a three-axis gyro and a tilt sensor. Mainly composed of main control MCU, A/D sampling chip, three-axis gyroscope and tilt sensor. The main control MCU is connected to the A/D sampling chip through the SPI serial bus, and the angular velocity of the three-axis gyroscope and the roll angle and the elevation angle of the tilt sensor are obtained through the A/D sampling chip, and then the attitude information fusion is performed to obtain the unmanned Pitch information for the pitch and roll. The main interface connection is shown in Figure 1.
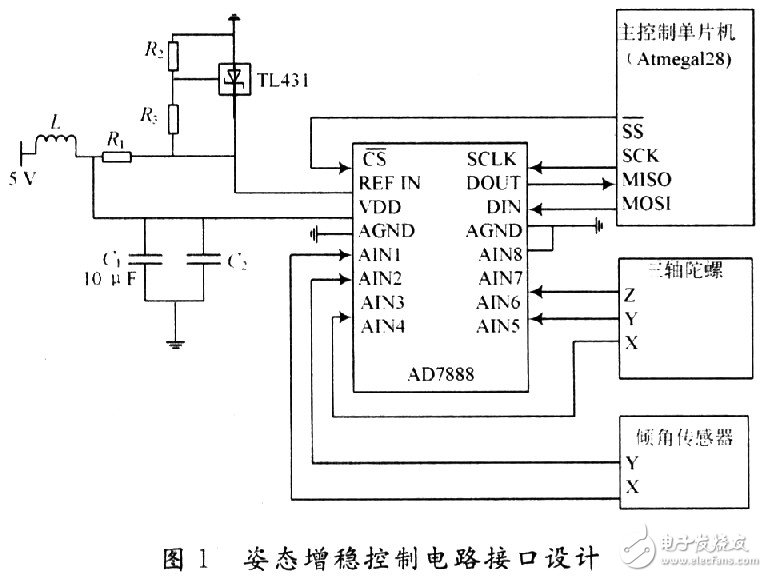
In Figure 1, the AD7888 is a high-speed, low-power, 12-bit analog-to-digital converter that can achieve a transfer rate of 125 KSPS with eight analog input channels.  For the chip select pin, this pin has two functions, namely to start the AD7888 converter and to make the transfer of serial data, and the microcontroller pin PB0 (
For the chip select pin, this pin has two functions, namely to start the AD7888 converter and to make the transfer of serial data, and the microcontroller pin PB0 (  ) connected. SCLK is the serial clock input pin, and the serial clock signal is provided by the external microcontroller ATmegal28 pin PBl (SCK). DIN is the logic data input and DOUT is the logic data output, which is connected to the pins PB2 (MOSI) and PB3 (MISO) of ATmegal28.
) connected. SCLK is the serial clock input pin, and the serial clock signal is provided by the external microcontroller ATmegal28 pin PBl (SCK). DIN is the logic data input and DOUT is the logic data output, which is connected to the pins PB2 (MOSI) and PB3 (MISO) of ATmegal28.
The range of the external reference voltage is Vref to VDD (Vref = 1.2 V). In order to obtain a stable reference voltage, a reference voltage circuit composed of TL431 is used. The TL431 from Texas Instruments is a three-terminal adjustable shunt reference with good thermal stability. Its output voltage can be set to any value from Vref = 2.5 V to Vref = 36 V with resistors R2 and R3.
The single-chip ATmegal28 and AD7888 are connected through the serial communication interface SPI, which are respectively configured as the master and the slave. The SPI bus allows high-speed simultaneous data transfer between the ATmegal28 and peripherals.
The three-axis gyro is mainly used to measure the angular velocity of the pitch angle, roll angle and yaw angle of the drone during flight, and calculate the angle change according to the angular velocity integral. In this system, the EWTS82 (hereinafter referred to as S82) of Matsushita Co., Ltd. is used, and the principle is to convert the earth deflection force (Crioli force) generated by the tuning of the tuning fork during rotation into an electric signal. The three-axis gyro is composed of a sensor device, a tuning fork drive circuit, and a signal processing circuit. This gyro is an analog device with a measurement range of +80 to -80 (°) / s, single-supply (+5 V DC) power supply, and better suppression of zero drift. In addition, its low price can greatly reduce development costs.
The tilt sensor uses the high-precision dual-axis tilt sensor SCAl00T from VTI Technologies of Finland, which is small and lightweight. It contains a silicon-sensitive capacitive sensor and an ASIC-specific integrated circuit. It has internal temperature measurement and compensation functions as well as self-test function. The maximum output range of single axis is about -40 to +40 °C, and the effective output range is - 30 to +30 °C. When the sampling frequency is 8 Hz or less, an output resolution of 0.002° is obtained. The serial peripheral interface SPI has an output frequency of 500 kHz and is controlled by a sensor element to withstand a mechanical response of more than 20 000 g. Its main features are: x, y dual-axis high-resolution bidirectional measurement, single-supply (+5 V DC) power supply, low operating current (3 mA), low noise, wide operating temperature range (-40 ~ +125 °C )Wait.
3 attitude stabilization control software designThe input of the whole flight control system is the flight state value collected by the sensor. The output is the control variable (rudder value and engine thrust) of the aircraft state equation, so the flight control system is essentially a multi-channel control system, ie more Input / multiple output control system. Among them, the core control loop of the flight control system is a flight attitude stabilization and control loop based on the attitude angle (pitch angle/roll angle) feedback signal, that is, the inner loop.
On the basis of the inner loop, an outer loop such as height keeping and track control is introduced.
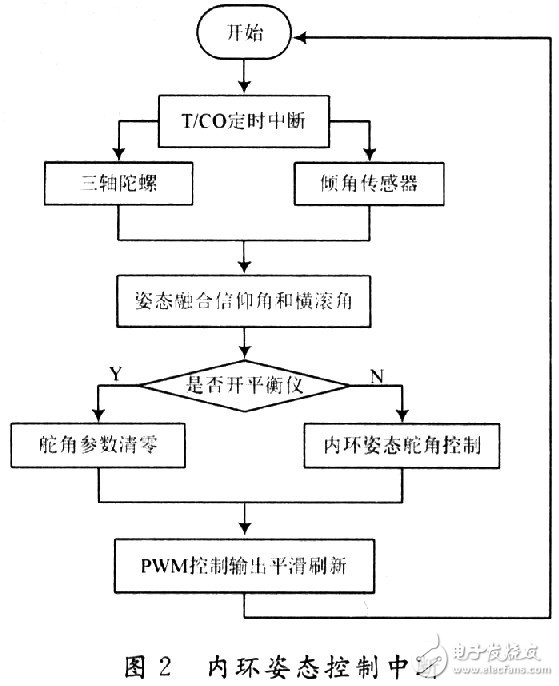
In the attitude stabilization control loop of the flight control system, the three-axis gyro feedbacks the angular rate of pitch, roll and yaw of the aircraft in real time. In addition, the pitch rate and the roll rate of the three-axis gyro are respectively solved by the attitude of the pitch angle and the roll angle measured by the tilt sensor. The main control MCU uses the timing interrupt of the timer/counter O to perform the attitude control of the inner loop at intervals of 30 ms. The control flow is shown in Fig. 2. Due to the symmetry of the aircraft along the longitudinal plane, the drone flight control can be divided into relatively independent longitudinal control and lateral lateral control channels.
(1) Lateral lateral control channel: The lateral movement of the drone, that is, the rolling and yaw motion of the drone, is mainly realized by the aileron passage. There are roll angle feedback and roll angular rate feedback in the lateral side control channel, which constitute the core circuit of the roll channel - the inner circuit. In addition, the heading deviation feedback only needs to be connected when the drone is directed by direct flight, heading tracking or autonomous navigation to stably control the flight direction of the drone; the lateral offset feedback is only when the drone enters the autonomous navigation. Access is required to control the drone to track the pre-set flight path; the error integral feedback is only accessed when the drone is directed to direct flight, to eliminate the influence of the left and right asymmetry of the drone, and improve the unmanned The accuracy of the heading control and the symmetry of the left and right turns.
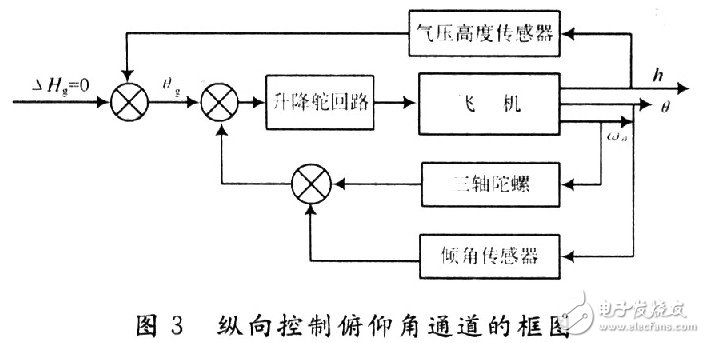
(2) Longitudinal control channel: The longitudinal movement of the drone refers to the pitch and lift movement of the drone. The longitudinal motion of the drone is achieved by manipulating the elevator of the drone. There are pitch angle feedback and pitch rate rate feedback in the longitudinal control channel, which constitute the core control loop of the longitudinal channel - the inner loop. In addition, there is height difference feedback, which only needs to be accessed when the drone is flying at a fixed altitude to stabilize the flying height of the drone. A block diagram of the longitudinally controlled pitch angle channel is shown in Figure 3.
The drone flight process can usually be divided into several relatively independent segments. A basic autonomous flight project can be divided into six segments: the take-off phase, the take-off phase, the turn phase, the return flight phase, the hover phase and the landing phase. The mission of each segment is relatively independent, and the complex flight state of each segment is decomposed into several basic missions: level flight, turn, and lift. In this way, the basic flight tasks such as leveling, turning, and lifting of the drone are coordinated through relatively independent longitudinal control channels and lateral lateral control channels.
4 ConclusionIn the drone, the flight control system is the main component, and the attitude stabilization control is an effective method for the drone to perform various tasks smoothly. Based on the practical application, this paper introduces the hardware implementation and software design of the full attitude stabilization control system based on the three-axis gyro and tilt sensor, and applies it to a certain type of drone for the flight attitude control in the system. The flow and the law of inner ring attitude control were analyzed and studied in detail. After more than 100 test flights, the attitude stabilization control system based on the three-axis gyro and tilt sensor not only meets the current mission requirements, but also achieves good results, providing a set of solutions for the development and development of similar drones. An effective method.
CL-2H Copper Connecting Terminals
Our company specializes in the production and sales of all kinds of terminals, copper terminals, nose wire ears, cold pressed terminals, copper joints, but also according to customer requirements for customization and production, our raw materials are produced and sold by ourselves, we have their own raw materials processing plant, high purity T2 copper, quality and quantity, come to me to order it!
CL-2H Copper Connecting Terminals
Taixing Longyi Terminals Co.,Ltd. , https://www.longyicopperterminals.com